

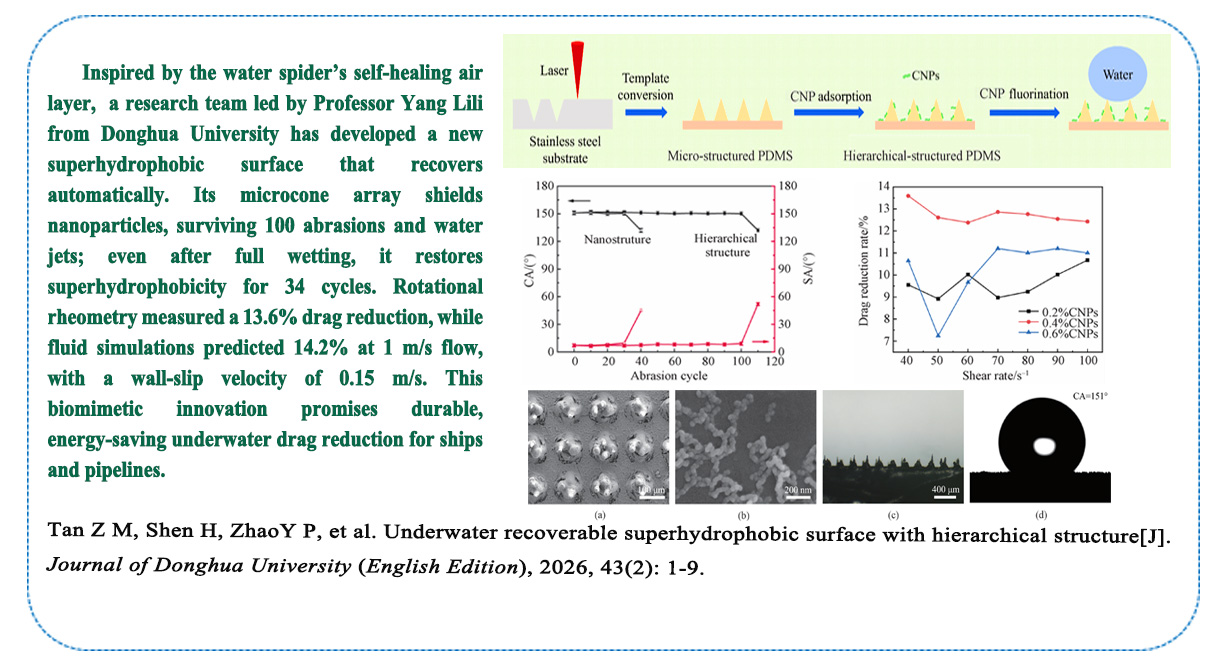
Silk Fibroin Composite Hydrogel: Modulating Immune Microenvironment to Enhance Diabetic Wound Healing
HE Wanjun;HE Chuanglong;To remodel the inflammatory microenvironment and accelerate chronic wound(such as diabetic wound)healing, this study proposes a novel multi-target immunomodulatory strategy based on an advanced silk fibroin composite hydrogel dressing that synchronously regulates macrophage polarization and regulatory T cell(Treg) proliferation. The rationally designed composite hydrogel is constructed from a three-component hydrogel(named GCS) consisting of gelatin methacryloyl(GelMA), quaternized chitosan(QCS), and thiolated silk fibroin(SF-TK). By further loading metformin(Met) and interleukin-2-incorporated poly(lactic-co-glycolic acid) microparticles(IL-2@PLGA), the final composite hydrogel denoted as Met/IL-2@PLGA/GCS was fabricated, which enabled sequential and controllable drug release. Scanning electron microscopy showed a well-defined three-dimensional microporous structure; rheological analysis and compressive stress-strain tests demonstrated favorable mechanical properties; in vitro drug release studies confirmed sequential release kinetics of the therapeutic agents. Live/dead cell staining confirmed that the composite hydrogel possessed excellent cytocompatibility. Immunofluorescence and flow cytometry results showed that the composite hydrogel significantly promoted M1-to-M2 macrophage polarization and enhanced Treg proliferation. In vitro angiogenesis assays with human umbilical vein endothelial cells(HUVECs) revealed an enhancement in tube formation capacity. In vivo experiments substantiated the hydrogel dressing's superior wound healing performance. Collectively, these findings provide compelling evidence that the multifunctional Met/IL-2@PLGA/GCS composite hydrogel achieves synergistic therapy for diabetic wound healing through modulation of inflammation, promotion of angiogenesis, and acceleration of tissue regeneration.
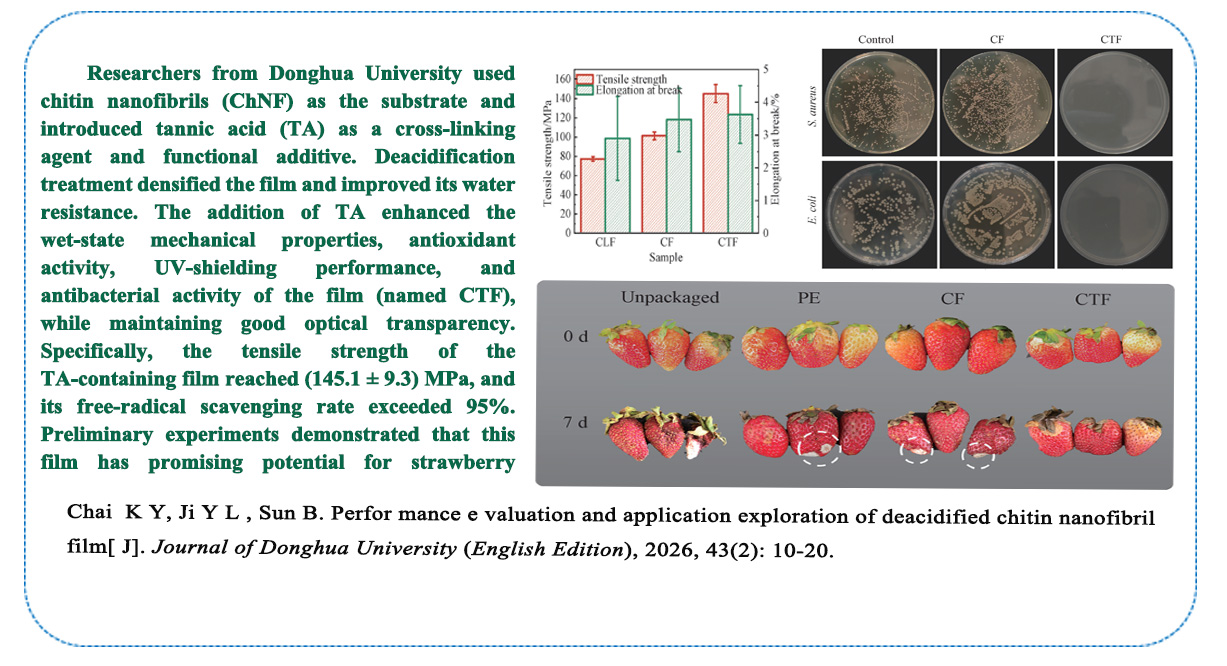
An Antigen/STING Agonist Conjugation-Based Nanovaccine with Responsive Release Promoting Dendritic Cell Maturation
JIANG Tiantian;HU Zhengyu;CHEN Zhen;SU Ting;LI Jingchao;To develop a nanovaccine capable of synchronously delivering antigens and adjuvants for effective dendritic cell(DC) maturation, we covalently conjugated the stimulator of interferon gene(STING) agonist MSA-2 with the model antigen CSIINFEKL via a cleavable linker. The resulting prodrug was co-assembled with phosphoethanolamine-polyethylene glycol(DSPE-PEG) to form a nanovaccine(termed NVAA). The NVAA exhibited a uniform spherical morphology with an average hydrodynamic diameter of approximately 20 nm and a zeta potential of-14 mV. Upon internalization by DCs, the covalently conjugated antigen and STING agonist enabled their synchronized intracellular delivery, leading to efficient activation of the STING signaling pathway. As a result, NVAA significantly enhanced the secretion of IFN-β, IL-6, and IL-12, and upregulated the expression of costimulatory molecules CD80 and CD86 on DCs. These findings demonstrate that the covalent conjugation-based nanovaccine NVAA effectively promotes DC maturation via STING pathway activation, providing a promising strategy for cancer immunotherapy.
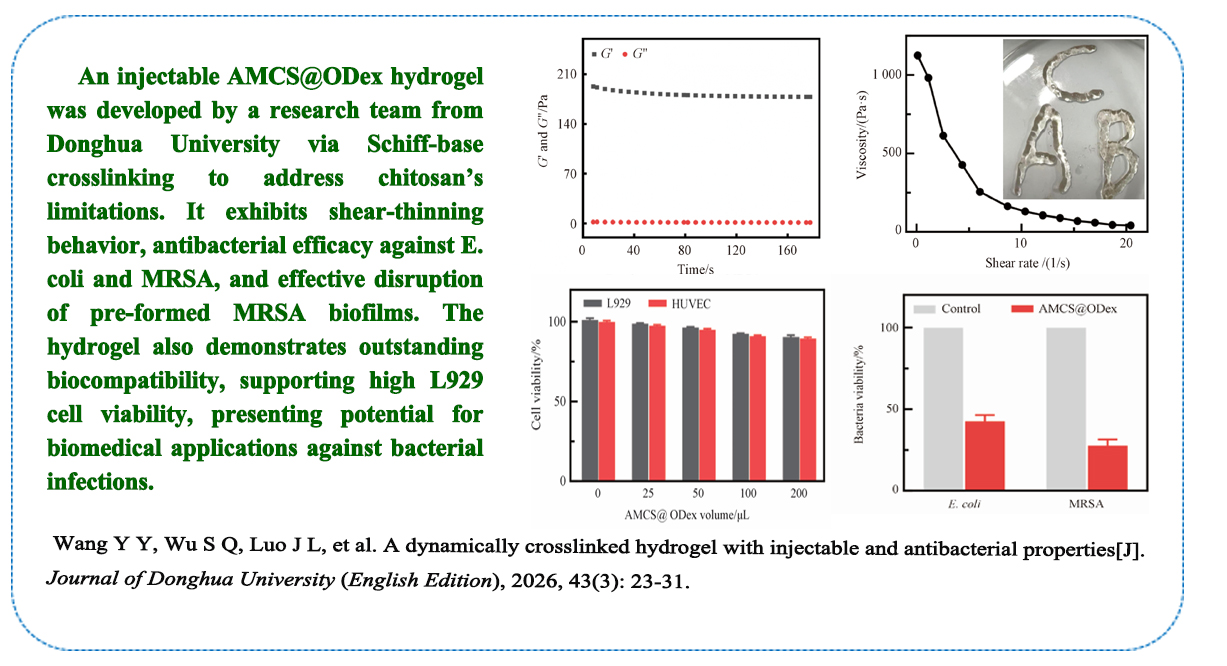
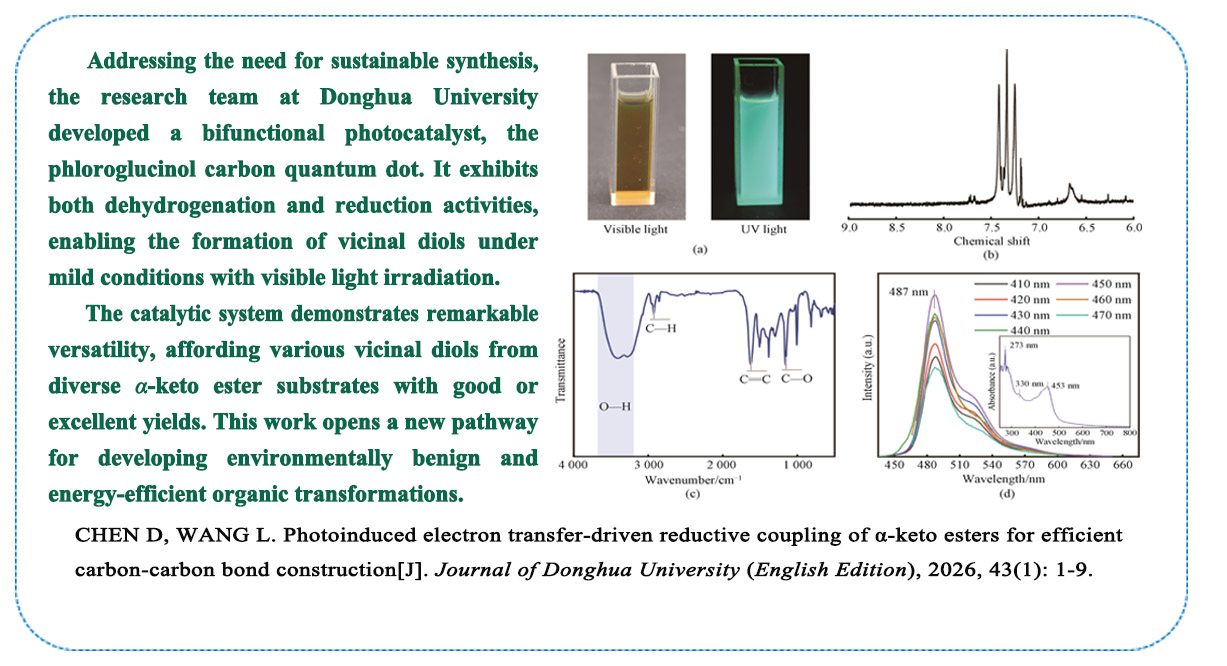
A Dynamically Crosslinked Hydrogel with Injectable and Antibacterial Properties
WANG Yueyue;WU Siqin;LUO Jinlan;WANG Yi;The clinical management of chronic wounds is frequently challenged by bacterial infection and biofilm formation. To address this, we developed an injectable hydrogel, denoted as AMCS@ODex, via dynamic Schiff base bonding between amide-modified chitosan(AMCS) and oxidized dextran(ODex). This crosslinking strategy not only mitigated the inherent limitations of chitosan, such as poor solubility and mechanical properties, but also endowed the hydrogel with excellent shear-thinning behaviors. AMCS@ODex exhibited antibacterial efficacy against Escherichia coli(E. coli) and methicillin-resistant Staphylococcus aureus(MRSA), and the antibacterial rates against E.coli and MRSA were 58% and 73%, respectively. Furthermore, it effectively disrupted pre-formed MRSA biofilms, leading to a disruption rate approximately 50%. Critically, the hydrogel exhibited outstanding biocompatibility, supporting over 90% viability of L929 fibroblast cells. By integrating good antibacterial performance, with desirable mechanical properties and high biocompatibility, the AMCS@ODex hydrogel presents potential biomedical applications, particularly in the fight against bacterial infections.
Nanofiber/Zwitterionic Hydrogel Composite for Anti-Foreign Body Reaction
DANG Xiangyu;GAO Yujie;CHEN Zhize;In this study, we developed a nanofiber/zwitterionic hydrogel composite aimed at overcoming the in vivo foreign body reaction. This composite leverages the adhesive properties of polydopamine(PDA) to integrate trimethylamine N-oxide(TMAO) zwitterionic hydrogel with a three-dimensional poly(lactic acid)(PLA) nanofiber membrane. The resulting material exhibits the robust mechanical properties characteristic of PLA, featuring a tensile strength of approximately 13 MPa and an elongation at break exceeding 20%. Furthermore, owing to the TMAO zwitterionic hydrogel, the composite demonstrates exceptional resistance to biological contamination. After 30 d in a murine model, the composite does not develop a dense collagen layer on its surface, maintaining a thickness of less than 30 μm.
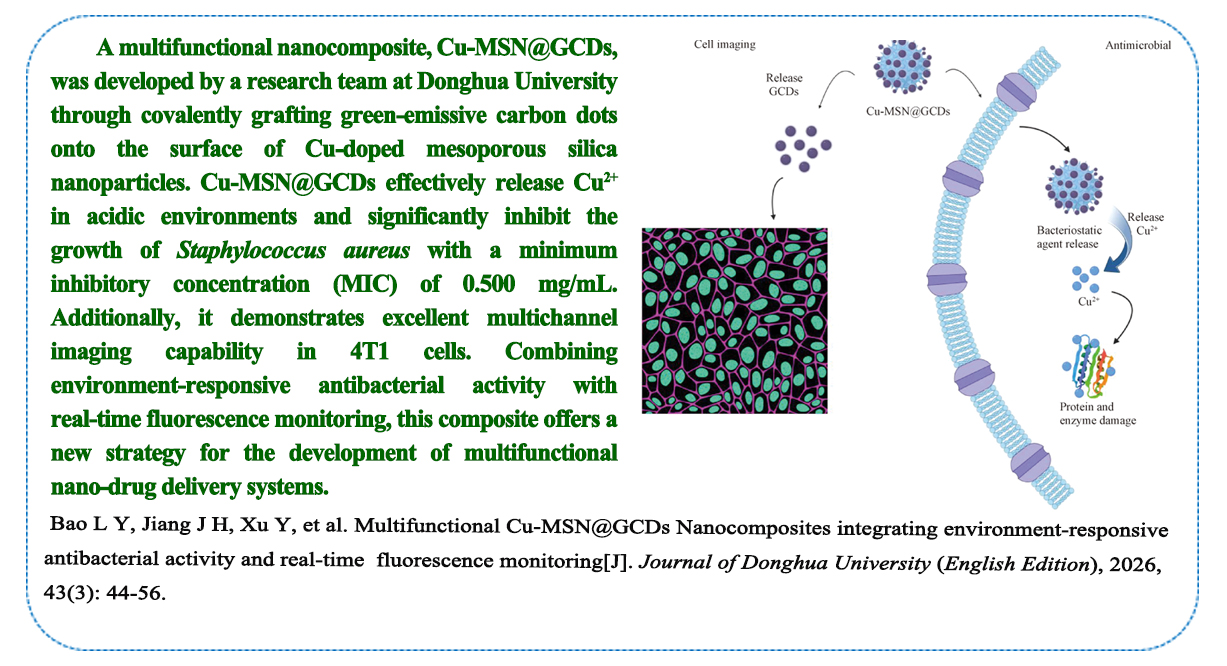
Multifunctional Cu-MSN@GCDs Nanocomposites Integrating Environment-Responsive Antibacterial Activity and Real-Time Fluorescence Monitoring
BAO Luyue;JIANG Jinghao;XU Yun;JIN Sibo;ZHOU Xingping;In this study, Cu2+-doped mesoporous silica nanoparticles(MSNs)(Cu-MSNs) were synthesized via a hydrothermal method, using MSNs as the host matrix. Subsequently, green-emissive carbon dots(GCDs) were covalently grafted onto the surface of Cu-MSNs through an amidation reaction, yielding a nanocomposite denoted as Cu-MSN@GCDs. Cu-MSN@GCDs were designed to combine antibacterial and cellular imaging functions. The GCDs, derived from sodium citrate and formamide, exhibited fluorescence stability in a pH range of 3.0-10.0 and possessed a specific Cu2+ fluorescence quenching property, enabling the detection of micromolar Cu2+. X-ray diffraction(XRD), Fourier transform infrared(FTIR) spectroscopy, and X-ray photoelectron spectroscopy(XPS) analyses confirmed that Cu-MSN@GCDs nanocomposites were successfully constructed. In vitro experiments showed that Cu-MSN@GCDs underwent significant degradation and released Cu2+ under acidic conditions(pH=4.8), and effectively inhibited the growth of Staphylococcus aureus(S. aureus), with a minimum inhibitory concentration(MIC) of 0.500 mg/mL. Additionally, the fluorescence imaging test showed a good multichannel color rendering ability in 4T1 cells. The nanocomposite combines environment-responsive antibacterial activity and real-time fluorescence monitoring function, providing a new strategy for the development of multifunctional nano-drug delivery systems.
Dual Fluorescent Hydrogel Derived from Cross-Linked Chitosan-SalicylaldehydeEu(Ⅲ) for Visual Detection of Volatile Amine and Meat Freshness
WANG Yanmin;ZHANG Xuan;Based on cross-linked chitosan(CS)-salicylaldehyde(SA)-Eu(Ⅲ), a dual fluorescent hydrogel, designated as Eu-SA-CS, was successfully fabricated. The Eu-SA-CS hydrogel exhibited a green fluorescence around 500 nm, whereas a red fluorescence around 600 nm was observed upon exposure to volatile amines such as triethylamine(TEA). There was a good linear relationship between the fluorescence intensity ratio and TEA volume concentration(0-40 μL/L). Furthermore, the hydrogel could be used to indicate the meat freshness by a change in fluorescence color from green(fresh) to red(spoiled). These results revealed that the present Eu-SA-CS hydrogel could serve as a smart green-red fluorescent signal label for real-time monitoring of meat freshness.
Advances in Biodegradable Polymeric Stents: A Review
WEI Yongzhong;CAI Guangfang;SONG Jiahui;QIN Chengxue;MO Xiumei;Cardiovascular diseases(CVDs) are the leading cause of global mortality, and impose a significant burden on healthcare systems worldwide. Traditional treatments, such as metallic stents, often lead to long-term complications, including restenosis, thrombosis, and chronic inflammation, due to permanent implantation. In response, biodegradable polymeric stents(BPSs) have emerged as a groundbreaking solution, offering temporary mechanical support to diseased vessels while degrading harmlessly over time, thereby promoting natural vascular healing and regeneration. This review synthesizes recent advancements in the development of BPSs, focusing on innovative biodegradable polymers(e.g., poly(lactic acid)(PLA), poly(lactic-co-glycolic acid)(PLGA), and polycaprolactone(PCL)), and advanced manufacturing methods(e.g., three-dimensional printing and laser cutting). While preclinical and clinical studies demonstrate promising outcomes, challenges persist in balancing mechanical durability with controlled degradation rates, managing inflammatory responses to acidic byproducts, and ensuring long-term safety. Future directions emphasize smart materials, hybrid manufacturing strategies, and personalized designs enabled by artificial intelligence. By addressing these challenges, BPSs hold transformative potential to redefine cardiovascular interventions, ultimately improving patient outcomes and reducing the global burden of CVDs.
Typing of Eight CYP450 Loci Based on Multiplex AS-PCR Techniques
LIU Xinyi;HE Shidan;DING Wanping;XIAO Junhua;In the era of personalized medicine, the study of single-nucleotide polymorphisms(SNPs) in cytochrome P450(CYP450) family genes is becoming increasingly important. The accurate genotyping of SNPs is of great significance for analyzing individual differences in drug metabolism and disease susceptibility, and promoting clinical precision medicine. Therefore, developing an efficient, accurate, and cost-effective detection scheme is extremely necessary. This study combined TaqMan probe technology with allele-specific PCR(AS-PCR), and by using a single-nucleotide ultra-high-fidelity polymerase, successfully developed an efficient and accurate 4-channel multiplex detection protocol for key CYP450 genes. This protocol accurately identified CYP450 gene alleles while eliminating interference from highly homologous sequences, and its specificity and accuracy were verified. The results showed that the cycle threshold differences(ΔCt values) of different SNP alleles and highly homologous segments in the same detection system could reach more than 4. The detection results were consistent with the sequencing results, and the method could better identify the genotypes of eight SNPs(rs1799853, rs1057910, rs2242480, rs776746, rs2069514, rs2070676, rs6413432, and rs890293). The detection protocol developed in this study offers strong specificity, high accuracy, and simple operation, while achieving a favorable balance among detection speed, cost, and accuracy. It can be readily applied in pharmacogenomics research.
Analysis of Cne Prp8 Intein Substrate Preference Based on mCherry Reporter System
CHEN Tianqi;ZHANG Xiaomeng;GAO Xianling;LIN Ying;Intein-mediated protein splicing provides a valuable tool for protein ligation. The amino acid sequences of the flanking exteins serve as the intein's natural substrates. Alterations to these extein sequences may cause significant changes in splicing efficiency. To date, how extein sequences at different positions(such as-1 and +2 positions) influence intein splicing activity remains to be systematically investigated. To address this issue, an mCherry-based fluorescence reporter system that links fluorescence intensity to splicing activity was established for high-throughput screening. A saturation mutagenesis library targeting the-1 and +2 positions of the Cne Prp8 intein was constructed via homologous recombination. After induction, 38 high-fluorescence clones were identified from 336 clones. Western blot analysis revealed that three substrate combinations(A/S, S/V, and R/S) achieved splicing efficiencies above 80%, significantly higher than that of the wild-type sequence. These findings not only reveal amino acid preferences at key extein positions but also provide valuable insights for the rational design of efficient splicing systems, thereby advancing the application of inteins in protein engineering.
Establishment and Characterization of Patient-Derived Xenograft Models for Osteosarcoma Lung Metastases
LI Da;YI Tao;YANG Yuqin;This study aims to investigate the feasibility and optimization of patient-derived xenograft(PDX) models for osteosarcoma lung metastases by comparing subrenal capsule and subcutaneous implantation methods. Three osteosarcoma lung metastasis samples meeting the inclusion criteria were implanted into NDG mice using both methods. Tumor growth, histological characteristics, immunohistochemical marker expression, and gene expression profiles were analyzed at eight weeks post-implantation. All three samples successfully established PDX models, with subrenal capsule implantation yielding significantly larger tumor volumes in two cases(p < 0.05). Histopathological and immunohistochemical analyses demonstrated high morphological similarity between the two models, with Ki67, CD99, and PD-L1 expression retained. Transcriptomic sequencing revealed a strong correlation in global gene expression between the two models(R > 0.8), with osteosarcoma-specific genes displaying similar expression patterns. These findings suggest that subrenal capsule implantation provides a stable and efficient approach for generating PDX models from limited osteosarcoma lung metastasis tissues while maintaining key biological characteristics comparable to those of subcutaneous models.
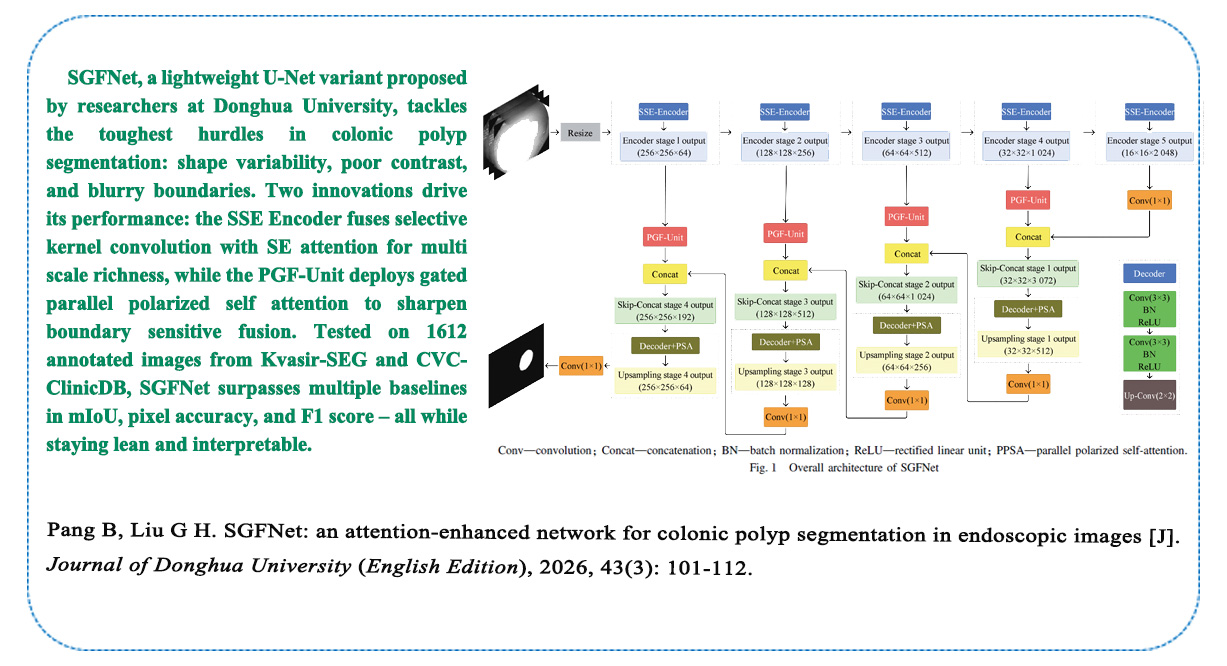
SGFNet: An Attention-Enhanced Network for Colonic Polyp Segmentation in Endoscopic Images
PANG Bo;LIU Guohua;Accurate segmentation of colonic polyps in endoscopic images is vital for early diagnosis and prevention of colorectal cancer(CRC). However, this task remains challenging due to the high variability in polyp morphology, low contrast with surrounding mucosa, and frequent boundary ambiguity. To address these issues, we propose a selective-gated fusion network(SGFNet), a lightweight semantic segmentation network based on the U-Net architecture. SGFNet incorporates two targeted modules: the SSE-Encoder, which integrates selective kernel convolution(SKConv) and squeeze-and-excitation(SE) attention to enhance multi-scale representation and channel recalibration; the PGF-Unit, which employs a gated parallel polarized self-attention(PPSA) mechanism to improve boundary-sensitive feature fusion. The model is evaluated on a unified dataset of 1 612 annotated images from Kvasir-SEG and CVC-ClinicDB. Experimental results demonstrate that SGFNet achieves superior performance in mean intersection over union(mIoU), pixel accuracy(PA), and F1 score, outperforming several representative baseline models. With its balanced design and strong generalization, SGFNet offers a practical and interpretable solution for real-world medical image segmentation and provides insights into attention-based module integration for future computer-aided diagnosis systems.
Early Diagnosis of Congenital Heart Disease Using Transformer-Based Deep Learning on Electrocardiogram Signals
RAHMAN Md Saifur;ZAMAN Junaid;KHAIRUL Md Sadi Iftia;ISLAM Md Rakibul;ZHANG Yihong;Congenital heart disease(CHD) is one of the most common birth defects worldwide and a major cause of pediatric morbidity and mortality. Early detection is essential for improving survival and long-term outcomes, yet timely diagnosis remains challenging, especially in primary-care and resource-constrained settings. Although electrocardiography(ECG) is inexpensive and widely available, subtle pediatric CHD abnormalities are difficult to detect through manual interpretation, which carries subjectivity and risk of misdiagnosis. Moreover, many existing deep-learning models rely on single-domain convolutional neural network(CNN) or recurrent neural network(RNN) architectures that insufficiently capture long-range temporal dependencies and frequency-domain features. To address these limitations, we propose pediatric AI for cardiac ECG recognition(PACER), a hybrid CNN-Transformer-discrete wavelet transform(DWT)-TabNet framework for automated CHD detection from standard 12-lead pediatric ECG signals. PACER integrates convolutional layers for local morphological extraction, Transformer-based self-attention for long-range temporal modeling, DWT for frequency representation, and TabNet for interpretable multimodal feature fusion. A tailored preprocessing and augmentation pipeline, including SMOTE and Gaussian noise enhancement, improves robustness to class imbalance. Evaluated on 10 344 pediatric ECG recordings using stratified cross-validation, PACER achieved an accuracy of 90.93%, an F1 score of 0.91, and an area under the receiver operating characteristic curve(ROC-AUC) of 0.95, outperforming CNN, RNN, hybrid, Transformer, and CHDdECG baselines. Ablation experiments and model interpretability analysis validate the effectiveness of each module and indicate the potential clinical utility of the proposed method.















































































































































































Tracking the information about your manuscript
Communicate with the editorial office
Query manuscript payment status Peer ReviewOnline Review
Online Communication with the Editorial Department Editorial OfficeCollecting, editing, reviewing and other affairs offices
Managing manuscripts
Managing author information and external review Expert Information
Download Center
Call for Papers
News
OSID Open Science Program
JDHUE Selected for CAS 2024 “Bilingual Communication Project of Scientific Journals”
JDHUE Selected for Shanghai Scientific Journals' Most Beautiful Cover Case Library
JDHUE Editorial Department Presents Thesis Writing Lecture for Graduate Students in the College of Chemistry and Chemical Engineering at DHU
JDHUE Editorial Department Presents Scientific Paper Writing Standards Lecture for International Students at DHU
more..Links
Subscription
Journal information
Journal of Donghua University (English Edition)
Started: 1984
Supervised by: Ministry of Education, China
Administered by : Donghua University
Editor-in-Chief: Zhu Meifang
CN: 31-1920/TS
ISSN: 1672-5220